Introduction to Control Systems

In Part 3 of this new Cyber Physical Systems series, I will introduce the concept of control systems, classifications, controller design and ideal control system characteristics.

Introduction to Control Systems
A control system is defined as
"a system of devices that manages, commands, directs, or regulates the behaviour of other devices or systems to achieve a desired result".
It achieves this through control loops, which are a process designed to maintain a process variable at a desired set point.
Automatic control helps with achieving optimal performance, improving productivity, simplifying and facilitating tasks, reducing human errors and simply makes tedious manual tasks automated. It effectively enables engineering, industrial and scientific advancements.
Automatic control is an essential part of high-tech industries such as:
Space Vehicles
Vessels
Airplanes/jet fighters (fly-by-wire)
Self-driving cars
Missile Guidance
Robotic Systems
Nuclear Power Plants
Manufacturing
HVAC
Industrial Processes
An example of an automatic control is your car's gearbox and whether it is manual or automatic. If it's automatic, it's likely controlled by your speed and how much throttle you are putting in.

Application of Automatic Control
Some of the different applications of automatic control are:
automated industrial robots
Auto pilot system and flight control components (FCC)
speed governance
dynamic positioning system (DPS) for vessels
temperature, pressure, flow and humidity control
Controlled systems are parts of our daily life from things like your fridge/room temperature controller to sophisticated ones such as self-driving cars.
A simple example could be your thermostat. When you set it to a specific temperature, it controls your heating system and could send hot water if it senses the temperature is low to the radiator to heat up your house. Once the desired temperature is reached, it will automatically turn off your heater (at least that’s the plan!).

Another example can be a more detailed and more industrial water tank system. There is a water tank with sensors inside that can read the level of water in the tank which is sent to the computer. Based on the amount of water in the tank, if it's low enough, it turns on the pump and add more water to the tank.

More sophisticated examples could be the dynamic positioning on a ship/vessel. In its basic form, the vessels that do seabed work/oil rig work, they need to maintain a very specific position in the rough sea.
The DPS (Dynamic Positioning System) installed on the ship consists of measuring the forces being applied by the waves, measuring wind speed, scanning the seabed to find where they are and grabbing the location from a potential satellite. All of this information is fed into a computer that makes the decision on how to control the ship precisely that it doesn't move even in rough weather.

The same idea goes for the "Fly By Wire" system on airplanes. In short, the system takes input from the pilots or autopilot which are processed by different computers and sent to the control surfaces which can be used to pitch/roll the aircraft.
From the autopilot, electronic signals are directly sent to the computers which process the information and make a decision.
This video explains it better than I ever could:

Importance of Control Systems
In essence, there is a flight envelope where the plane should be operating in (called the Flight Envelope). If you try to get altitude very quickly at low speed, the plane will stall. If you try to maneuverer at very high speed, it could cause severe damage to the airplane.
A control system is in place to monitor the input and make sure the airplane is operating within the safe zone.
The Boeing 737 MAX Manoeuvring Characteristics Augmentation System (MCAS) is an example of an aggressive control system installed on the 737 MAX - if you've seen the Netflix documentary about the downfall of Boeing, you know about this!
In short, pilots were not trained or made aware of this system which resulted in two catastrophic instances and every 737 MAX was grounded internationally. The system essentially gathered wrong data from the sensors, which cause the system to push the airplane nose down in order to stabilize it when it was not necessary.
This video explains it well:
It was fixed eventually by requiring that both sensors are now checked (one on the left, one on the right) before manipulating the aircraft's noise. Secondly, it's now required that the system only tries to tilt the noise down one time, instead of continuously. Thirdly, when it corrects itself, the amount it corrects has been reduced so it's not as dramatic.
I just want to say that this example is NOT meant to scare you to never take a plane again, but rather to show the incredible dangers of control/automatic systems and how, if they are not implemented correctly or checked for every possible scenario, very dangerous incidents can happen.
In essence, a too aggressive of a control system and it potentially puts people lives in danger.

Concept of Automatic Control
Control process systems are comprised of different elements. They are designed to monitor a process or plant to make sure it does NOT vary from pre-set limits.
To achieve this, it changes the manipulated variables (inputs) within their specified range to maintain the controlled variable (output) at some desired value.
For example, changing the fan speed of your CPU cooler or case fans (manipulated variable) to keep the CPU temperature (controlled variable) within its safe operation range.

In the above image, we have an input that comes into the process. Next, we have some input such as disturbances (e.g. wind on an airplane). Some of it you can measure, some you cannot. Finally, we have some output (e.g. trying to keep the airplane at a specific altitude).
An automated control system is a closed-loop system of mechanical and/or electronic devices that automatically regulates a process variable to achieve a pre-set desired state or set point without human interaction.
Such controlled systems are designed based on the assumption or knowledge of the normal/desired operation range of the system.
For instance, back to the PC fan example, the fan is designed to keep the CPU temperature within a certain limit. It will be designed with some assumptions that it will run at room temperature.
There are 4 main stages/functions in an automated control system:
Measurement
Comparison (between what is happening and the desired input)
Computation (what needs to be done to adjust the system)
Correction (applying the changes)
In an automatic control, we have some certain terminologies:
Plant - part of a system that is going to be controlled or regulated is called plant. This could be a piece of equipment or a set of machine parts. The purpose of a plant is to perform a particular operation.
Process - any operation to be controlled is called a process.
Controller - an element of the system which controls the plant or the process is called a controller.
Input - an external signal applied to the control system in order to generate a specified output (e.g. room temp, CPU fan speed)
Output - response obtained from the control system when the input signal is applied. To understand the behaviour of the system to the input, it is important to acquire the output.
I will discuss that the controllers are in the next part, but the idea is that you have a desired output from the system and based on that you have your reference input (i.e. temperature at 20 degrees) and you have a controller that turns on/off your boiler and then you have a temp sensor that reads the temp.
Then, you can do a comparison between the temp you want and the room, which is fed into the controller. Based on that, the controller makes the decision for it to stay on or be turned off.
Something else to discuss is the aforementioned disturbances. This is an undesired signal that adversely impacts the value of the output;. It is unavoidable in real-life systems and we cannot control it.
If the disturbance is generated within the system, it is called an Internal Disturbance. An example is you're getting measurements from your GPS to control the location of your drone. The GPS is not 100% accurate (e.g. noisy data from the GPS). It is part of the system/measurements.
If the disturbance is generated outside the system, it acts as an additional input affecting the output therefore it is called an External Disturbance. An example is with the drone again, but this time if the wind is moving your drone and affecting its position, that is external disturbance and can impact the output of the system (e.g. its overall position).
One of the main reasons of using control systems is the presence of disturbance.


Control System Types
There are many different types of control systems. Some include the following:
Natural - the planet and human body are natural control systems (e.g. you eat food when you're hungry, dehydration tells your body you need water, etc...)
Manmade - any control system made by humans
Manual - it is not automatic (example is light switch - you have to turn it on/off yourself)
Automatic - think about things like human body temperature, room temperature. Your body can regulate the temperature by sweating for example.
Open-loop - no feedback from the process (e.g. washing machines, toasters). For the toaster, you press the button and you get no feedback when it is ready/not. If the time is not right, it burns. If the time is correct, you get toast. Or your shower (you have to manually adjust the tempearature of your shower).
Closed-loop - these systems receive some information from the controlled process (e.g. fridge, auto-pilot). For the fridge, you plug it in and set the temperature and then your fridge keeps working until it reaches that temp. It has a sensors that measures the temp. Once that temp is reached, it turns off the fridge so it does not become a freezer and continually use power.
Linear & Non-Linear - in linear, the output has a linear relation with the input (increasing the input by x would increase output by x), whereas non-linear does not. The toaster is an example of a linear system (1 slice needs 1 minute, 2 slices needs 2 minutes). a non-linear system example could be the force required to open or close a bottle or the fuel efficiency vs speed.
Time variant vs time invariant - when the system behaviour does not change with time, it is time-invariant. When the system behaviour changes with time, it is called time-variant. When you set the temperature in your house, it doesn't take into consideration if you're sleeping (why do you need the heating on when you are asleep). However, by adjusting some features like telling it to turn on in the morning, afternoon and night, it becomes time-variant.
With this, you can create a sort of tree that trickles down the different types listed above:


Open Loop Control Systems
Any control system that does not automatically correct the variation in its output is called open-loop systems. The output depends on the input of the system. However, controlling actions or input is totally independent of the output.
The output remains constant for a constant input, assuming that the external conditions remain unaltered (no disturbances). Output of the system is not compared with the reference input therefore the accuracy of the system depends on the calibration.

Back to the toaster example, at the start, the number on the dial you usually use might mean it goes for 2 minutes. However, over time, there may be a drift in the calibration and in the future, it might go for a slightly longer time (e.g. 2:30 minutes). It would need to be recalibrated.
Adversely impacted by the presence of disturbance. It is only practical for simple systems where the input and output relation is known and there are no internal/external disturbances. They should be very simplistic systems.
Systems that rely on time are often open-loop. For example, traffic lights, toaster, washing machine, microwave and the oven.
The biggest advantages to open loop systems are as follows:
Simplicity to design and therefore cheap and economical (simple to design, no feedback/sensors/computers needed)
Useful when output is difficult to measure
Easy and cheap maintenance (only regular calibration required)
No feedback stability issues (no feedback from output, so they don't become unstable by receiving false/incorrect readings)
However, some disadvantages are:
Accuracy depends on calibration accuracy
Inaccurate if there are variations in external environment
Regular maintenance and recalibration is required to maintain the quality and accuracy of the system
Some examples (back to the lovely toaster!) are as follows:



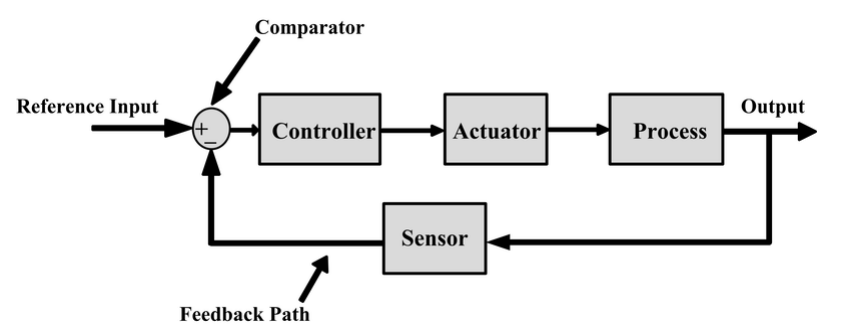
Closed Loop Control Systems
This system maintains a predefined relationship between the output and input by means of comparing them. This is also called a feedback control system.
They get a measurement from the output, look at the desired input, and compare them. The input and output both depend on each other.
Feedback is always used to better control the action and reduce the system output error.

The error is fed to the controller, so it controls the system such that the error is reduced to zero.
The following diagram will explain it:

There is a reference input that is fed to the controller. The controller takes the input, manipulates the signal (e.g. room temp), the heating turns on, the room temp is measured by sensors, the temperature could be 18 and you want 20. This is then fed back to the comparator and then you would calculate the error (e.g. 20 -18).
Then, the controller looks at the error, does some processing (e.g. keeps the heating on until it hits 20) until the output is the same as the input and the error is 0.
The various signals you have are:
r(t) - reference input
e(t) - error signal
c(t) - controlled output
m(t) - manipulated signal
b(t) - feedback signal
The error is calculated by using the following (I apologize, I hate maths too):
e(t) = r(t) +- b(t)
When the feedback (b) is positive, system is called a positive feedback system and if b is negative, it is called a negative feedback.
In terms of the temp system, we decided to subtract the temperature from 20 degrees in the example above (e.g. a negative feedback system).
The controller proportionally adjusts the error signal to generate the manipulated signal (m) to keep the process under control. m(t) is generated such that to reduce the error to zero, this signal is used to control the process such and generate the controlled output c(t) (e.g. room temp is rising).
Ok, no more maths now I promise. We can leave that to the engineers.
Some advantages of a closed loop:
High accuracy as the output is constantly monitored and manipulated signal is generated to reduce the error
Internal/external disturbance impact is mitigated, as changes are sensed by the controller to modify the error accordingly.
No regular recalibration or maintenance is required as the system can adjust
Some disadvantages include:
Complicated, time-consuming and expensive design (as requires more sensors)
A bad design could lead into incorrect feedback, therefore pushing the controller to overcorrect/undercorrect and make the system unstable
Overcorrection and instability is one of the biggest challenges of the design (this is a BIG thing/challenge)
Regular maintenance and recalibration is required to maintain the quality and accuracy of the system
An external disturbance could make the system unstable and produce results that are unexpected - this is what is usually targeted by attackers (e.g. they cause some sort of disturbance and try to make it overcorrect/undercorrect itself).
Some examples of closed loop include a room heater and a manual speed control:


Closed vs Open Loop
Very quickly, I wanted to show this table that outlines the comparisons between the two types of loop systems discussed above:


Ideal Control System
A good control system needs to have:
Accuracy - it must be accurate. The open loop systems are usually less accurate compared to closed loop systems where feedback is introduced to reduce the error and improve the accuracy
Sensitivity - should be insensitive environmental changes (external disturbance (be able to correct for disturbance))
Noise tolerance - insensitive to noise and disturbance and yet sensitive to input commands. Should be able to reduce the effect of undesired disturbance
Stability - stable by nature. Output of the system must be close to the reference input (desired output). In other words, error should be closed to zero. It must produce bounded outputs for bounded inputs
Bandwidth - for the entire input range, it should generate a satisfactory input
Speed - the output of the system should reach its desired value as quickly as possible. The system should settle down to its final value as quickly as possible
Oscillation - system should have suitable dampening. The output should follow the reference input without too many oscillations and overshoots without sacrificing the speed of the system